主な内容
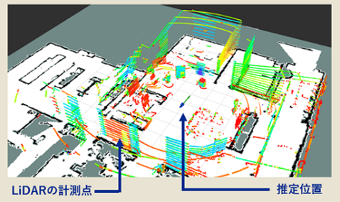
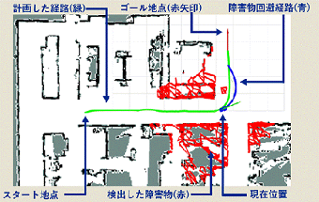
アプリケーションでは、ロボットの稼働環境に合わせて多様なセンサを駆使し、ロボットが自律動作するためのアルゴリズム開発を行っています。また、人との協調動作を行うための人検出や音声会話など、ロボットの使い勝手を良くする様々な仕組みを部品化しています。提供するサービスや利用場所に合わせ、ROS (Robot Operating System) などのミドルウェアで統合したロボットのソフトウェアシステムの開発を行っています。

主な装置
- 走行試験(自律走行機能検証、モーションキャプチャなど)
- 模擬実証実験スペース(ショップ、リビング、介護用バスルーム、小上がり)
- その他の試験機器(落下衝撃、高速度カメラ、サーモグラフィーなど)
初回のご利用に当たっては、機器の操作方法などのレクチャーをさせて頂きます。
事前の見学・ご相談も承っております。お気軽にお問い合わせください。
ロボット技術グループ TEL:03-5530-2706
対象:すべて
| 項目名 | 項目コード |
|---|---|
| 1. 強度試験機 (7) 落下試験機 | S11711 |
| 1. 強度試験機 (8) 落下衝撃加速度測定装置 | S11811 |
| 2. 物理特性試験機 (3) サーモグラフィ | S21311 |
| 3. 観察機器 (10) 高速度カメラ | S32111 |
| 3. 観察機器 (10) 高速度カメラ(ステレオ) | S32121 |
| 19. サービスロボット評価機器 (13) ハイスピードマイクロスコープ | SK2411 |
19. サービスロボット評価機器
| SK3311 |
| 19. サービスロボット評価機器 (23) 波形評価装置 | SK3511 |
対象:ロボット・車椅子・台車に限る
| 単価名称 | 単価コード |
|---|---|
| 19. サービスロボット評価機器 (4) 傾斜路モーションキャプチャシステム | SK1411 |
19. サービスロボット評価機器
| SK3411 SK3421 SK3431 SK3441 |
主な研究
2022年度
- 中村 佳雅:「レイアウト変更で性能劣化しない自己位置推定技術」,TIRIクロスミーティング2022,2022年10月21日.
- 武田 康司:「AI技術で誤検知を抑えた移動ロボットの小物体検出」,TIRIクロスミーティング2022,2022年10月21日.
2021年度
- 中村 佳雅:「2DLiDARを用いた環境地図の自動更新機能の開発」,TIRIクロスミーティング2021,2021年9月15日.
